
第一章 激光雷达战略定位与技术演进
1.1 产业拐点与市场格局
2023年全球车载激光雷达出货量突破120万台(Yole数据),单价从8,000降至400(Velodyne VLP-16 → 禾赛AT128)。技术演进路线:
- 测距原理:TOF时间飞行 → FMCW调频连续波
- 扫描方式:机械旋转 → MEMS微振镜 → Flash固态 → OPA光学相控阵
- 波长升级:905nm(成本导向) → 1550nm(性能导向)
1.2 市场驱动因素
驱动力 |
典型表现 |
影响程度 |
L3+自动驾驶强制配置 |
中国工信部L3准入新规要求激光雷达 |
|
成本下降临界点 |
$500/LiDAR引爆前装市场(2024) |
|
分辨率突破 |
128线雷达点云密度>2M点/秒 |
第二章 核心应用场景深度解析
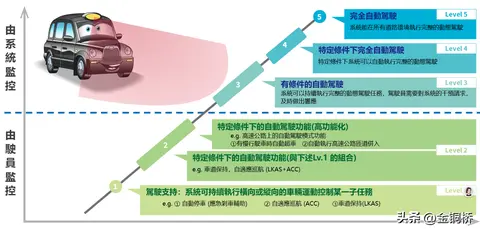
2.1 自动驾驶系统(L3-L5)
① 前向主感知系统
功能 |
技术指标 |
典型解决方案 |
高速NOA |
探测距离≥200m@10%反射率 |
图达通Falcon(1550nm) |
AEB增强版 |
垂直视场角>25° |
速腾聚创M1(MEMS) |
路面特征识别 |
点云密度>100点/㎡ |
Luminar Hydra(300线) |
② 全场景冗余感知
理想MEGA感知架构:
- 前向:1×128线混合固态雷达(120°×25°)
- 侧向:2×96线补盲雷达(180°×75°)
- 点云融合:时空同步精度<5ns(自研LCC协议)
2.2 ADAS增强功能(L2+)
① 城区导航辅助驾驶
- 小鹏G9方案:2×Livox HAP雷达(ROI区域动态聚焦)
- 技术创新:Flash激光雷达实现0.1°分辨率(Ouster OS3-128)
② 自动泊车系统
场景 |
雷达类型 |
性能指标 |
垂直车位检测 |
侧视Flash雷达 |
探测距离20m |
低矮障碍物识别 |
MEMS短距雷达 |
高度检测精度±1cm |
2.3 车路协同应用
- 路侧感知节点:华为道路激光雷达(有效探测半径300m)
- 隧道定位增强:InnovizTwo隧道点云补偿算法(定位误差<10cm)
第三章 核心技术创新解剖
3.1 光学系统革命
① 扫描架构对比
类型 |
代表产品 |
优势 |
缺陷 |
机械旋转 |
Velodyne VLS-128 |
360°全视角 |
寿命<1,000小时 |
MEMS |
速腾聚创M1 |
成本$400 |
视场角受限(120°) |
Flash |
Ouster OS2-128 |
零运动部件 |
探测距离<100m |
OPA |
Quanergy S3 |
电子扫描 |
量产难度高 |
② 光源波长技术路线
905nm路线:
- 优势:硅基探测器成本低(滨松S14643)
- 痛点:人眼安全功率受限(<50mW)
1550nm路线:
- 优势:人眼安全阈值高(允许500mW)
- 突破:铟镓砷探测器量产(雷神技术)
3.2 信号处理关键技术
① FMCW技术突破
- Aeva Aeries II:4D点云+瞬时速度测量(精度0.1m/s)
- 物理原理:
② 点云AI处理引擎
- NVIDIA LiDARNet:点云分割延迟<15ms
- 华为河图引擎:动态ROI密度提升10倍
3.3 车规级突破
认证标准 |
关键要求 |
达标产品案例 |
ISO 26262 |
ASIL-B功能安全 |
InnovizTwo |
IEC 60825 |
人眼安全Class 1 |
Luminar Iris |
AEC-Q102 |
-40°C~105°C工作温度 |
禾赛AT128 |
第四章 前沿解决方案全景透视
4.1 高性能低成本方案
禾赛科技AT128架构
光源:905nm VCSEL阵列(8个发光区)
探测:SPAD阵列(128通道)
扫描:二维MEMS振镜(振动角度±15°)
量产成本:$499(2024年报价)
车规认证:通过50项严苛测试 4.2 FMCW技术落地方案
Aeva 4D Perception Core
- 技术优势: 同步获取距离/速度信息(消除运动模糊) 抗干扰能力提升100倍(自研相干检测)
- 量产进度:2024年搭载保时捷Taycan
4.3 补盲雷达创新方案
速腾聚创E1(Flash技术)
第五章 技术挑战与演进路径
5.1 当前技术瓶颈
- 极端环境性能:浓雾衰减达20dB/km(1550nm优于905nm)
- 成本结构:光学组件占BOM成本45%(MEMS振镜占15%)
- 车规可靠性:MEMS振镜疲劳寿命<1亿次(目标>10亿次)
5.2 2025-2030技术路线图
第六章 标准体系与测试认证
6.1 核心标准规范
- ISO 13228:激光雷达性能测试方法(探测概率/误报率)
- SAE J3016:L3+系统对激光雷达的功能要求
- GB/T 40669-2021:中国车载激光雷达技术规范
6.2 测试技术前沿
- 多目标模拟器:光程科技LT-5000(支持256目标同步)
- 环境干扰测试: 太阳光干扰:>100klux照度测试 雨雾模拟:5~200mm/h降雨强度可调
第七章 产业生态与竞争格局
7.1 市场份额分析(2024)
7.2 中国产业链突破
- 光源端:瑞波光电量产905nm VCSEL阵列(功率密度500W/mm²)
- 探测器端:灵明光子SPAD芯片(探测效率>20%)
- 算法端:地平线征程5激光雷达专用加速核(4D点云处理)
第八章 结论与发展建议
激光雷达技术将围绕"性能极限突破"与"成本平民化"双轨并进:
- 性能赛道:1550nm+FMCW路线解决高速场景痛点
- 成本赛道:VCSEL+SPAD硅光集成颠覆BOM结构
- 创新方向:光子集成电路(PIC)实现光学系统单芯片化
国产替代路径:
- 卡脖子环节突破:高功率1550nm光纤激光器(替代IPG进口)
- 车规认证加速:建立自主可靠性测试标准(参考ISO 21434)
- 产业集群建设:打造长三角"光-芯-算"一体化产业链




